- 产品
- 详情
- 推荐



收藏
¥1000.00
1-49套
¥900.00
50-99套
¥800.00
≥100套

产品规格
可售数量: 100400套

ZN-POLK32高铁列车运行控制系统实训设备
一、高速铁路列控仿真系统概述
列车运行控制系统是我国铁路提速线路和高速铁路保证列车行车安全、提高列车运行效率的重要技术装备,以有效的技术手段对列车运行速度、运行间隔进行实时监控和超速防护;同时能够减轻司机劳动强度、改善工作条件,提高乘客舒适度。
鉴于 CTCS 列控系统的控制逻辑功能均为软件实现,同时考虑到用户实训基地建设场地、使用及成本等方面因素,本方案中高速铁路列控仿真系统以高速铁路的信号系统为原型采用纯软件仿真进行设计。
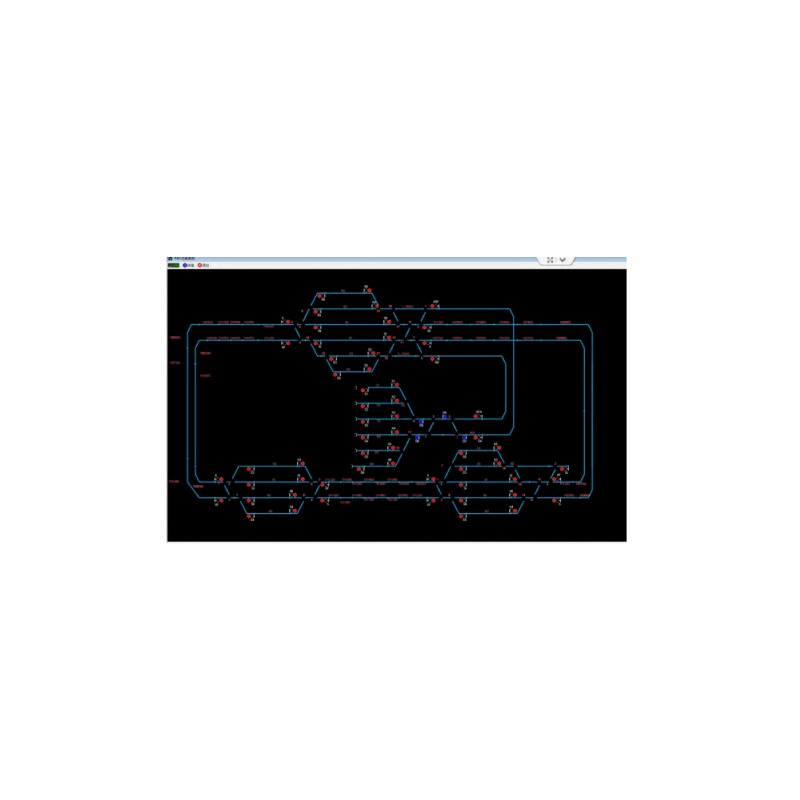
ZN-POLK32高铁列车运行控制系统实训设备包含轨旁信号实物设备仿真平台、计算机联锁系统、RBC 系统、TCC 系统、TSR 系统、车载 ATP 仿真系统、点式应答器仿真系统、轨道电路仿真系统、机车操作(司控器)系统等。整个CTCS2/3 级仿真系统满足铁总颁布的《C2/C3 总体技术规范》要求,能够实现完整的列车运行控制原理展示及相关的设备实操、故障设置等实训功能。本项目设计的信号平面布置图如下所示,依据高铁设计规范,设计三个正线车站,一个动车段:

二、总体方案说明
系统包含高精度 3D 虚拟高铁沙盘,轨旁信号实物设备软件仿真平台、计算机联锁系统、RBC系统、TCC 系统、TSR 系统、车载 ATP 仿真系统、点式应答器仿真系统、轨道电路仿真系统、机车操作(司控器)系统等。整个 CTCS2/3 级仿真系统满足铁总颁布的《C2/C3 总体技术规范》要求,
能够实现完整的列车运行控制原理展示及相关的设备实操、故障设置等实训功能。
系统采轨旁设备仿真软件平台仿 路现场设备、轨旁控制组合电路(软件仿真继电器及组合架)、TCC 驱动采集模块、应答器仿真模块、RBC、TSRS、CBI 等各种工作站均采用计算机设备。

1. 线路正线模拟 CTCS-3 级原理
1 设备包含:计算机联锁系统、列控中心(TCC)、 临时限速服务器(TSRS)、 无线闭塞处理器(RBC)、点式应答器(有源、无源)、LEU 仿真、车载 ATP、无线传输系统仿真。
2 正线区间不设信号机(设区间分界标),有 RBC 计算列车移动授权,发送移动授权给车载ATP 控制列车安全间隔。
3 TSR 可以与 TCC 及 RBC 建立通信,发送临时限速指令,通过 RBC 或应答器发送至车载设备。
4 能够无缝降级至 CTCS2 级系统,完全符合 CTCS 系统铁路现场技术要求。
2. 线路动车段及出入段线模拟 CTCS-2 级原理
1 设备包含:计算机联锁系统、列控中心(TCC)、点式应答器、LUE、ZPW2000A(软件仿真发码,根据场地情况可以选配硬件)。
2 区间信号机全部由列控中心控制,实现 C2 自动闭塞功能。
3. 项目实例展示

三、CTCS-2系统总体描述
1. 系统概述
CTCS-2 是基于点式应答器、轨道电路传输列车运行控制信息的点连式列控系统。地面设备由轨道电路设备传输连续列控信息,由点式应答器、车站列控中心传输点式列控信息。动车组车载设备根据地面提供的信号动态信息、线路静态参数、临时限速信息及有关动车组数据,生成控制速度和目标——距离模式曲线,控制列车运行。本系统将上述各个子系统全部采用软件模块仿真。
2. CTCS-2 列控系统介绍
2.1 CTCS-2 系统结构
2. CTCS-2 列控系统介绍
2.1 CTCS-2 系统结构
车载设备:车载 ATP 设备,包括:车载计算机、轨道电路天线(STM)及接收单元、应答器天线及处理单元(BTM)、ATP 人机交互设备(DMI)、机车接口单元。
地面设备:车站计算机联锁,车站列控中心(TCC),临时限速服务器(TSRS),轨旁电子单元(LEU)和有源应答器/无源应答器,TCC 驱动采集设备ZPW2000A 轨道电路仿真设备。

CTCS-2级是基于轨道传输信息的列车运行控制系统;CTCS-2级面向提速干线和高速新线,采用车-地一体化设计;CTCS-2级适用于各种限速区段,地面可设通过信号机,机车乘务员凭车载信号行车。
2.2 CTCS-2 系统组成
2.2.1 地面子系统组成
系统组成
2.2.1 地面子系统组成
2.2.1.1 计算机联锁
上位机软件具备接收学员操作功能、站场动态显示功能、报警功能。电务维修机软件具备站场动态显示功能、数据存储功能、回放再现功能。联锁机软件具备联锁逻辑控制及接口功能。计算机联锁主控系统,具备通过与组合架仿真系统连接来实现对信号机、转辙机的控制功能;计算机联锁主控系统可以对本科车站信号课程进行辅助教学,让学生更加真实和快速的了解车站计算机联锁系统方面的知识。
2.2.1.2 列控中心
根据列车占用情况及进路状态计算行车许可及静态列车速度曲线并传送给列车。
2.2.1.3 轨道电路仿真
完成列车占用检测及列车完整性检查,仿真向列车传送连续控制信息
2.2.1.4 点式信息设备
用于向车载设备传输定位信息、进路参数、线路参数、限速和停车信息等。
2.2.2 车载子系统组成
2.2.2.1 连续信息接收模块
完成轨道电路信息的接收与处理。
2.2.2.2 点式信息接收模块
完成点式信息的接收与处理。
2.2.2.3 车载计算机
对列车运行控制信息进行综合处理,生成控制速度与目标距离模式曲线,控制列车按命令运行。
2.2.2.4 人机界面
车载设备与机车乘务员交互的设备。
2.2.2.5 无线通信接口。
为 C3 提供信息接口
2.3 CTCS-2 系统功能
车载 ATP 超速防护功能。
列车进路信息传送功能。
临时限速设定和向列车传送功能。
区间点式信息传输功能。
上下行方向判别。
TCC 应防止当区间轨道电路瞬时分路不良时,错误改变运行方向。TCC 应防止方向继电器误动错误改变区间方向。区间正反向运行时,轨道电路均应按照追踪码序发码。
TCC 通过站间安全信息传输获得邻站边界区段的状态以及编码所需的信息,实现闭塞分区编码逻辑的连续性。当邻站 TCC 传输的边界轨道电路低频码为检测码 时,本站边界应发 HU 码,如下图所示:

对于区间轨道区段,TCC 应根据前方轨道区段占用状态以及前方车站接车信号开放情况,按照轨道电路追踪码序发码。

闭塞分区空闲时,同一闭塞分区内的所有轨道电路区段低频发码应保持一致。

由多个轨道区段组成的闭塞分区,列车所在区段及运行前方所有区段发送正常码,后方各区段均发检测码。

TCC 在区间改变方向期间应控制轨道电路设备发送检测码,在确认区间改变方向成功后,按新的运行方向发码。区间改变方向过程启动时间为 TCC 驱动方向继电器的时机开始,区间改变方向结束时间为 TCC 检测到方向继电器动作到位后的时机结束。
信号机点灯
区间信号机点灯控制
设置有区间地面信号机的客运专线,应由 TCC 实现区间信号机的点灯功能。
TCC 应驱动 LJ、UJ、LUJ、HJ 继电器实现区间信号机点灯,信号机的显示与轨道电路低频信息码的关系应符合 TB3060 及有关规定的要求,点灯控制原理参见附录 C。
相邻 TCC 应传递分界处相邻闭塞分区的占用信息和低频码信息,以及信号机的红灯断丝状态,作为本站区间点灯控制条件。
TCC 应控制和当前运行方向相反的区间信号机灭灯,当 TCC 中的区间方向未知时,控制区间信号机灭灯,并控制区间轨道电路发送检测码。
四、CTCS-3级系统总体描述
1. 系统概述
CTCS-3 级列控仿真系统包括地面设备和车载设备。地面设备由 RBC、TCC、TSR、轨道电路仿真、应答器(含 LEU)仿真设备等组成;车载设备由 ATP 仿真计算机、无线通信单元(RTU)、轨道电路仿真信息接收单元(TCR)、应答器信息接收仿真模块(BTM)、人机界面(DMI)、列车接口单元(TIU)等组成。
RBC 根据轨道电路、联锁进路等信息生成行车许可,并通过 GSM-R 无线通信系统将行车许可、线路参数、临时限速传输给 CTCS-3 级车载设备;同时通过GSM-R 无线通信系统接收车载设备发送的位置
过安全接口送给 RBC;同时,TCC 具有轨道电路编码、应答器报文储存和调用、站间安全信息传输、临和列车数据等信息。TCC 接收轨道电路列车占用的信息,并接收临时限速服务器发送的临时限速信息,通过点式应答器发送至车载设备满足后备系统需要。
应答器向车载设备传输定位和等级转换等信息;同时,向车载设备传送线路参数和临时限速等信息,满足后备系统需要。应答器传输的信息与无线传输的信息的相关内容含义保持一致。
车载 ATP 仿真计算机根据地面设备提供的行车许可、线路参数、临时限速等信息和动车组参数,按照目标距离连续速度控制模式生成动态速度曲线,监控列车安全运行。
2. 系统主要设计原则
TSR 系统(临时限速服务器及操作终端)
TCC 系统(列控中心服务器及操作终端)
RBC 系统(移动闭塞处理器系统及操作终端)
LEU 系统(点式应答器轨旁电子单元)
BTM 系统(点式应答器车载处理单元,软件模块仿真其功能)
VATP 系统(车载 ATP 系统既 HMI 单元)
以上各个设备除 LEU 外均采用计算机及相应应用软件模拟,能够仿真真实 C3 各个子系统的功能,并且可以操作、演示
3. 系统结构

五、系统设备组成及功能描述
1. 列控车载设备
1.1 配置原则
1. 列控车载设备
1.1 配置原则
车载设备主要有与真实 DMI 类似带触控屏幕的一体式计算机完成,仿真计算机通过应用软件可以完成如下功能仿真:
车载 ATP 计算机(VC)
应答器信息接收模块(BTM)
轨道电路接收模块(TCM 软件仿真)
人机界面(DMI)
1.2 设备配置
车载 ATP 设备:
台式计算机一套、ATP 仿真软件一套,包含安全计算机 ATP 逻辑功能仿真机及人机界面仿真,实现该列车的 ATP 功能完全仿真和展示。
应答器信息接收模块(BTM):
触控式一体机一套、BTM 仿真功能软件一套,每当列车进过应答器可以在计算机界面显示机车收到应答器信息,并显示应答器发送的信息报文,可以形象直观的仿真出车载 BTM 系统的功能。
1.3 设备功能
CTCS-3 级列控车载仿真设备负责接收地面数据命令信息,生成速度模式曲线,监控列车运行,保证列车运行安全。
1.3.1 在 CTCS-3 级模式下:
CTCS-3 级列控车载设备应具有以下基本功能:
自检功能
数据的输入和存储
信息接收及发送
车载设备通过通信系统向 RBC 发送司机选择输入和确认的数据(如车次号、列车长度),列车固有性质数据(列车类型、列车允许速度、牵引类型等),车载设备在 RBC 的 、注销信息,定期向 RBC 报告列车位置、列车速度、列车状态(正常时)和车载设备故障类型(非正常时)信息,列车限制性信息以及文本信息等。同时,车载设备接收 RBC 发送的行车许可(包括车载设备识别号、目标距离、目标速度以及可能包括的延时解锁相关信息、防护区相关信息、危险点相关信息),紧急停车(无条件紧急停车和有条件紧急停车),临时限速,外部报警信息以及文本信息等。
车载设备通过应答器获取列车的位置信息。
1.3.2 在 CTCS-2 级模式下:
BTM 接收无源应答器的列车定位信息和一定范围内的线路参数以及有源应答器的进路线路参数信息和临时限速信息。
车载设备的轨道电路信息读取模块具有接收多个载频的功能,并从中解调出低频信息。
1.3.2.1 列车定位
车载设备具有确定列车位置的功能,该功能是依据地面设备软件仿真系统应答器及轨道电路收到的信息并以此为基准点通过测速单元等设备测量列车运行距离来获得列车位置。计算列车位置时要考虑测速设备的误差。车载设备应定时向 RBC 报告列车位置。
1.3.2.2 行车许可和限速命令显示
车载设备根据得到的行车许可和限速命令通过 DMI 向司机显示目标距离、允许速度,还可以运用声音提示等方式向司机进行报警,提供司机足够的显示信息,方便司机驾驶。
1.3.2.3 行车许可和限制速度的监督
车载设备允许司机以安全速度行驶,保证列车在静态和动态速度模式曲线监督下安全运行。当列车速度超过报警速度值时向司机报警,报警持续到实际速度低于允许速度为止;列车速度超过常用制动速度值时,车载设备实施常用制动直到实际速度低于缓解速度,此后可以由设备或司机选择缓解常用制动;如果常用全制动失效列车速度超过紧急制动速度值,车载设备实施紧急制动,列车停稳后司机才能缓解紧急制动。
1.3.2.4 溜逸防护
为防止列车溜逸,车载设备监视列车的运行方向和当前运行状态。当列车发生溜逸时,车载设备实施紧急制动,该制动只能在列车停车后才能由司机缓解。
1.3.2.5 集成功能
CTCS-3 仿真列控车载设备既包含 CTCS-3 控制单元,也包括 CTCS-2 控制单元,二者同时运行。
CTCS-3 控制单元负责 CTCS-3 级模式下的核心控制逻辑计算功能;CTCS-2 仿真控制单元负责
CTCS-2 级核心控制逻辑计算功能;两者共用 DMI 人机界面模块、列车接口单元模块、测速测距模块、BTM 模块,CTCS-3 控制单元连接 GSM-R 单元,并负责系统总线管理及统一对外输出。
CTCS-2 仿真控制单元的逻辑控制功能完全有计算机的应用软件完成,不需要额外增加硬件设备。
在下行 C3 区段如果 TCC 故障,系统可以自动降级为 CTCS2 级系统运行。
2. 地面子系统
2.1 TSR 临时限速服务器仿真系统
调度中心设列控系统专用临时限速服务器及临时限速操作终端仿真计算机。用于临时限速的下达与取消。

为了提高临时限速命令的安全性,保证 RBC 和 TCC 临时限速命令的一致性、完整性、有效性、以及冲突检测等功能,在调度中心设列控系统专用临时限速服务 器(TSR 服务器)。临时限速服务器的功能如下:
对限速命令进行安全存储,验证限速命令来源的合法性、限速数据的有效性,校核发往两个目标系统(RBC 和 TCC)的临时限速一致性。
执行命令时检查两个目标系统的临时限速执行情况,当发生一致性冲突或其他异常情况下,向目标系统发送导向安全的恢复指令,同时向操作员终端发送报警信息,提醒操作员处理。
记录限速命令的操作和状态变化日志,供查询和分析。临时限速服务器直接与 RBC/联锁安全数据通信以太网连接,通过该网络实现与 RBC 和 TCC 的通信连接,传输临时限速相关信息。

2.2 RBC 仿真系统
RBC 的配置原则重点考虑三大重要因素:控制能力、接口能力及维护适应性。RBC 及其它关键设备应采用冗余配置。
每台 RBC 的控制能力包括:(1)同时登录的列车数量、(2)同时设定的进路数量、(3)同时激活的临时限速数量、(4)同时激活的紧急区域数量、(5)同时激活的临时调车区域数量。
综合考虑各种限制条件和运行调试、维修维护的便利性,RBC 主机宜集中设置。

全线设置两台 RBC 仿真计算机,可以实现 RBC 控制权交接和控制区无缝切换,RBC 系统采用应用软件完成仿真功能,软件采用冗余安全结构,软件模块包括:无线闭塞单元(RBU)、协议适配(VIA)、操作控制终端和网络通信设备等设备组成,如下图所示。

2.3 GSM-R 仿真通信网络
本项目采用软件网络监测系统完成 GSM-R 无线通信系统的仿真。通过对各个系统的通信链路监测实现对 GSM-R 系统的功能仿真和故障设置。
通信网络结构
2.4 轨道电路仿真系统
软件仿真实现轨道电路功能并实现列车位置检测和轨道空闲检测。
2.5 TCC 列控中心仿真系统
TCC 是 CTCS-2 级列控系统地面子系统的核心部分。根据轨道区段占用信息、联锁进路信息、线路限速信息等,产生列车行车许可命令,并通过轨道电路和有源应答器,传输给车载子系统,保证其管辖内的所有列车的运行安全。
TCC 之间通过安全局域网进行连接,实现 TCC 之间、与车站联锁之间安全信息传输。
CTCS-3 级列控系统各车站、线路所及中继站均设置一套 TCC,中继站距离一般不超过 15 公里,特殊困难地段不能超过 20 公里。
本项目设置 TCC 软件仿真系统四套,采用台式机计算机及相应应用软件完成仿真。

2.6 点式应答器仿真系统
系统设置 LEU 仿真软件的运行平台。符合铁路信号系统故障导向安全原则;大屏幕 LED 显示器,完成 HMI 功能,通过语音、文本、特殊图元变化等方式直观的显示应答器报文传输及工作状态。

有源应答器报文编制软件运行在普通商用台式 PC 机 Windows 系统中,具有初始化、存储数据、提取站内信息、连接数据源等功能。通过对线路基本数据的导入生成应答器基本报文数据,结合环境模拟器发送的进路信息和控制中心下达的临时限速信息,生成有源应答器报文。

2.6.1 无源应答器
无源应答器存储固定信息,当列车经过无源应答器上方时,无源应答器接收到车载天线发射的电磁能量后,将其转换成电能,使地面应答器中的电子电路工作,把存储在地面应答器中的数据循环发送出去,直至电能消失(即车载天线已经离去)。
2.6.2 有源 应答器
有源应答器通过专门电缆与地面电子单元(LEU)连接,可实时发送 LEU 传送的数据报文。
2.7 线路仿真服务器系统
软件运行在普通商用台式 PC 机 Windows 系统中,此软件是整个 C2/C3 列控仿真系统的地面中枢部分,负责地面线路信息的产生及显示、进路命令的执行、故障设置以及列车运行显示等。环境模拟器运行在服务器中,主要负责 CTCS 轨旁基础设备仿真系统的数据存储和软件间相互通信。具有数据库初始化、应答器初始化、网络监听、故障设置等功能。

2.8 计算机联锁仿真系统
2.8.1 系统功能
2.8.1.1 站场操作和显示功能
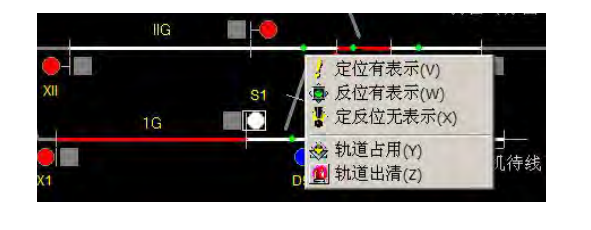
具有对站场内设备的动态显示功能;具有对站场内信号机、道岔、轨道电路的操作功能;具有同时对站内多条不同进路的操作和动态显示功能。下图为站场操作及显示的示意界面。

2.8.1.2 进路处理功能
具有站内多条列车进路、调车进路、引导进路、调车中途折返进路等的建立和不同解锁功能。下图为办理引导进路、调车进路的情况。

2.8.1.3 与 TCC/RBC 的通信功能
依据《C3 级列控系统总体技术规范》要求,与列控系统交互相关控制信息。
9.1.4 故障设置/取消功能
具有对站内信号机、转辙机和轨道电路的故障设置/取消功能,可验证进路在各种故障情况下的故障-安 理。下图是对轨道电路、道岔故障设置/取消的功能菜单。
2.9 CTC 模拟机 (可选)
以图形化显示所有线路和站场,完成不整个线路车站/所的显示和操作。
可完成临时限速的下达、显示,操作过程符合铁道部标准;
分散自律调度集中控制系统包含 CTC 中心模拟子系统。
CTC 中心模拟子系统由 CTC 行车调度台系统、CTC 调车调度台系统组成。CTC 行车调度台系统和 CTC 调车调度台系统可分别指定行车和调车的计划运行图,实现高速铁路线路按计划运行图运行。

作为 CTC 中心模拟子系统中主要组成部分,CTC 行车调度台系统位于调度中心内,由列车调度员控制。可手动编制 24 小时列车运行图和各种天窗图标。也可根据基本图和日班计划进行修改和调整并下达阶段调整计划至各车站自律机系统。不同列车计划线的颜色和图样严格按照“调规”的要求编制。可以向车站和司机发送调度命令、红色许可证、绿色许可证、路票等。

行车调度台系统位于调度中心内,由列车调度员控制。列车调度员是本区段内行车工作的统一指挥者,指挥助理调度员通过 CTC 系统正确操纵所辖区段内各站信号设备,指挥综合维修调度员及时、正确的编发调度命令,并进行检查确认;负责与计划、机调、客调等工种联系,及时、正确的在运行图上标注图表信息。
3. 维护终端
图形化显示列控系统与其他设备的通信状态;
记录并显示系统所有报警信息和状态信息;
可查看并翻译当前列控中心报文信息以及无线闭塞中心与车载 ATP 交互信息
4. 场景服务器 1 台
与其它系统互联,统一管理系统中所有设备。
可实时语音播报系统所有设备状态。

5. 3D 虚拟高铁沙盘控制系统
5.1 系统介绍
5. 3D 虚拟高铁沙盘控制系统
5.1 系统介绍
该系统主要由立体沙盘模型、模型接口控制设备、信号仿真系统设备等组成。轨道交通立体沙盘模型可以根据用户需求设计,立体模型上所有线路均根据真实的高铁工程图纸按照一定的里程比例和时间比例精确计算后设计实现。
沙盘的景观建筑模型有沙盘线路设计所参考的原型线路的周边标志建筑和城市地标建筑;沙盘上环境美化的山水、树木、绿化装饰广场、线路、房屋建筑模型、机场模型等,精美逼真的山水装饰及各建筑模型。
5.2 系统用户
系统用户主要包括系统管理员、路局调度指挥中心调度长/调度员、车站值班员、行车计划人员、派班计划人员、信号系统维护及检修人员、系统培训员,其他具体需求可以根据业主要求灵活设置。
系统管理员:主要负责用户/功能权限和 CTC 功能的维护和检查。
中心调度长/调度员:主要负责监视全线或部分线路的列车和设备,运营调度和计划调整,并访问各种统计报告。
车站值班员:负责本站或者全线范围内的监视,和本站范围内的临时控制。
行车计划人员:负责制定基本的列车运营计划,时刻表编辑。
派班计划人员:负责编制派班计划。
系统维护人员:负责维护并保障信号系统的正常运行,控制其他用户的行为,以及访问各种统计报告。
信号设备维护人员。
5.3 系统特点
采用三维虚拟现实技术实现信号设备的仿真,用计算机实现信号设备的操作。同时结合专门针对教学开发的图像化软件展示信号控制系统内部控制逻辑及运转方式。
在一个软件平台下,实现不同设备的仿真,设备种类全。当增加新设备后,可单独开发该设备的仿真模块即可,满足多元化的培训需求。
实现计算机联锁网络化实训,可以与既有的实物联锁及轨旁实物设备接口、联动。
通过车务终端对信号机,转辙机等设备进行相应操作,如进路排列,道岔单操;在信号设备控制下模拟司机台驾驶操作列车运动。
6. 高铁沙盘模型
6.1 沙盘台体
6. 高铁沙盘模型
6.1 沙盘台体
组合式沙盘底座,采用钢质围裙,钢柱、钢管连接,方便拆装,表面彩色高级喷塑处理;沙盘所有木料经干燥、防虫处理;台面采用 16mm 大芯板制作,不锈钢围边。沙盘规格尺寸依据实验室实际面积定制。

6.2 车站设施
站房、站台使用彩色国际知名品牌亚克力板,1:87 比例仿真进口铜质镀烙钢轨,有地下,地面,高架线路。包括:岛式站台,混合式站台,侧式站台,含车站照明亮化等;高铁线路车站外形应接近实际车站外形;
6.3 轨道区段

轨道表面镀烙处理;与实际轨道形状一致的“工”字型钢轨;设置轨道电路;能确保列车运行平稳可靠,不会因任何原因造成车轮短路铜轨不良而影响系统正常工作,按1:87 比例制作。
6.4 道岔
每组道岔均能定反位电动转换,并具有定反位回路表示,以保证道岔位置的真实性,避免由于线路故障或道岔执行机构故障导致的无反馈位置信息,道岔尺寸和轨道相符。
6.5 信号机
采用不锈钢空心柱、有机玻璃、LED 显示灯位信号,信号机设置符合铁路规范。

6.6 高铁线路接触网架线
接触网架设在一个高铁站和一个邻站区间,接触网(可通电演示)采用工字型支柱,半补偿悬挂装置与全补偿悬挂装置,线路上应设有分段绝缘器、锚段关节、中心锚节、馈电线、电连接器、回流线等设备,接触网尺寸和轨道相符。

6.7 电器材料
用于信号机、道岔、轨道区段等设备与控制器之间的信号采集及通讯控制,以及各控制台之间的网络通讯;电源线采用符合 GB/T5023-2008 标准的 RV 电源线;网线采用带屏蔽层的超 5 类网线;采用快速以太网交换机,构建实训室控制工作站局域网。
6.8 高架桥梁
沙盘采用高速铁路高架桥梁,采用有机玻璃模拟制作,采用双线整体桥面,设置了防排水体系、防护墙、电缆槽、检查通道人行道板、栏杆等。隧道与假山结合,仿真实物制作,双线隧道,设置防排水、综合洞室等。外形美观逼真、耐用,比例协调。

6.9 山水树木绿化装饰
沙盘表面其他空闲地,布置草坪、树木、山体、湖泊、河流等绿化装饰;树木沿着街道马路布置,体现城市面貌;假山上面布置灌木丛,丰富绿化效果;各公园、广场绿化装饰,包括水池、草坪、花池、树木、灯光等;精美逼真的山水装饰采用压克力和 ABS 板,路灯,广场草坪灯等采用安全电压。
6.10 广场,线路房屋建筑模型
形象仿真的高级建筑群,当地标志性建筑;建筑外形应尽可能接近实际。
应含城市建筑群亮化,路灯,广场草坪灯等。建筑群及车站照明亮化采用安全电压。
6.11 CRH3 型动车组
一动一拖为一列车,车辆模型带多级调速控制,可以自动调节车辆运行速度,列车运行持久平稳。列车由轨道供电,提高车辆供电稳定持久性。车辆内部配装无线通讯模块,接受相应速度码,确保无线通信畅通。车辆模型外形和实际一致。

6.12 不锈钢玻璃护栏
采用直径 50 毫米、高 400 毫米不锈钢柱,12 毫米厚全透明磨边玻璃做防护栏。

6.13 实训室平面布置图及沙盘线路图

6.14 实训室平面布置效果参考图:

六、CTCS级间转换关系
符合 CTCS 规范的列车超速防护系统应能满足一套车载设备全程控制的运用要求。
系统车载设备向下兼容。
系统级间转换应自动完成。
系统地面、车载配置如具备条件,在系统故障条件下应允许降级使用。
系统级间转换应不影响列车正常运行。
系统各级状态应有清晰的表示。
七、机车及车载ATP仿真
1. 车载设备基本功能
1.1 CTCS-3 级列控车载设备应具有以下基本功能
1.1.1 界面显示
列控车载设备提供显示和操作界面 DMI,安装在司机便于操作和观察的位置,为司机提供驾驶过程的参考信息。
DMI 显示格式采用铁道部统一的技术标准,满足 CTCS-3 级系统显示、兼容 CTCS-2 级系统显示的要求。
显示内容包括:警示信息显示、速度信息显示、设备状态信息显示、距离信息显示、报警信息显示、司机活动监督等。
1.1.2 信息接收及发送
车载设备通过 GSM-R 系统向 RBC 发送司机选择输入和确认的数据(如车次号、列车长度),列车固有性质数据(列车类型、列车允许速度、引类型等),车载设备在 RBC 的 、注销信息, 定期向 RBC 报告列车位置、列车速度、列车状态(正常时)和车载设备故障类型(非正常时)信息,列车限制性信息以及文本信息等。
同时,车载设备接收 RBC 发送的行车许可(包括车载设备识别号、目标距离、目标速度以及可能包括的延时解锁相关信息、防护区相关信息、危险点相关),紧急停车(无条件紧急停车和有条件紧急停车),临时限速,外部报警信息以及文本信息等。车载设备通过应答器获取列车的位置信息。
1.1.3 静态曲线比较
车载设备根据列车数据和线路数据生成静态列车速度曲线,静态曲线考虑线路速度等级、线路允许速度、列车的限制速度等计算得到线路所有位置的列车允许速度。
1.1.4 动态曲线计算
车载设备考虑列车运行的各种限制生成动态列车制动模式曲线,动态曲线包括常用全制动曲线和紧急制动曲线。计算动态列车制动模式曲线的公式和参数经过评估,在保证安全的前提下尽量优化制动曲线,减少制动距离。
1.1.5 列车定位
车载设备具有确定列车位置的功能,限于仿真系统区段长度、小车特性等该功能仅可以依据地面应答器收到的信息并以此为基准点来获得列车位置。车载设备应定时向 RBC 报告列车位置。
1.1.6 速度的测量及显示
鉴于本仿真系统车辆及线路特点,本系统测速采用司控器手柄模拟列车速度上传的方式实现。通过司控器控制手柄的控制条来模拟小车实际速度并上报给 ATP。实际运行的小车在线路上匀速行驶。
1.1.7 行车许可和限速命令显示
车载设备根据得到的行车许可和限速命令通过 DMI 向司机显示目标距离、允许速度,还可以运用声音提示等方式向司机进行报警,提供司机足够的显示信息,方便司机驾驶。
2. 司控器软件
ATP 及司控器软件控车
在点式应答器仿真计算机同时运行有司控器软件,该软件仿真列车司机手柄,可以手动控制列车前进、后退(上行/下行)、停车。
同时手柄刻度可以模拟列车实际速度并上报给 ATP,用以作为实现 ATP 功能的输入。
司控器拖动滚动条可以实现速度大幅调整,通过鼠标单击左键可以实现 1KM 级速度精确调整。停车需使用“停车按钮”以保证列车立即停车。

3. 车载设备接口
在CTCS3级系统中,车载设备通过GSM-R无线网络实现列车与RBC间的双向的连续的信息传输;车载设备通过应答器接收模块(BTM)接收来自地面应答器的点式信息。在车载设备仿真系统中,同样模拟了车载设备与 RBC、应答器间的通信接口,实现车载设备与地面设备之间的信息传输。
车载设备与 RBC 的接口。车载设备通过 GSM-R 无线网络与 RBC 交互信息,车载设备仿真系统接收 RBC 传送的运行许可、临时限速及线路参数等信息,向 RBC 发送列车的位置报告信息等。
车载设备与应答器的接口。车载设备仿真系统通过车载设备上的应答器信息接收模块(BTM)实时读取轨旁应答器的信息,根据应答器编号获取存储于应答器组内的线路参数、定位基准信息等。

4. 界面显示
主界面分为六个主显示区,如图所示

显示条件与显示颜色对应关系见表 2:
速度表盘
列车速度采用双备份显示。一种方式是速度表,表盘的刻度为 0~450km/h;另一种方式是数字,在速度表的中间区(B1 区)显示列车速度值。
速度表盘呈圆形,显示从 0km/h 至 450km/h 的速度。速度表盘的数字和速度刻度均为白色,数字显示在刻度线内侧。

假定 0 度从中心垂直向上,-140 度的角度显示 0km/h,+140 度的角度显示 450km/h,在-5 度的角度显示 150km/h。将绘制速度刻度的方式分成两段:一段包括的角度从-140 度到-5 度,表示从 0km/h 到 150km/h 的速度;二段包括的角度从-5 度到+140 度,表示从 150km/h 到 450km/h的速度。
速度表盘显示 0,50,100,150,250,350 和 450km/h 的刻度值。字体为 Arial 大小为 16 磅(推荐),颜色为白色。每隔 10km/h 的速度画一条刻度线,标识数字的刻度线较长,其余的刻度线较短。因此从 0km/h 到 150km/h 刻度之间的角度比从 150km/h 到 450km/h 刻度之间的角度大。长刻度线的长度为 25 个像素;短刻度线的长度为 15 个像素。
围绕速度表盘以光带方式显示允许速度(Vperm)、目标速度(Vtarget)、干预速度(Vint)、开口速度(Vrelease)等速度信息。环形速度表的具体表示方式如图所示:

沿着速度表盘的外边界,从-145 度到+145 度显示环形光带,环形光带的角度范围比速度刻度的稍大(因为允许显示 0km/h 的目标速度)。环形光带宽 9 个像素点,允许速度处的宽度为 20 个像素点(宽出的部分叫做“钩”)。钩子的尺寸应为 6×20,具体尺寸描述见下图所示

在列车未超速情况下,显示器以不同颜色的光带在速度表的表圈上显示目标速度和允许速度。
列车速度超过 SBI 或 EBI 时,以光带方式显示紧急制动速度,从允许速度到紧急制动速度之间光带的宽度为正常光带宽度的两倍,颜色为红色;或者,列车速度超过干预速度(Vint)时,以光带方式显示干预速度,颜色为红色。
以图标的方式显示列控车载设备制动状态。DMI 根据列控车载设备的制动状态显示图标。如果列控车载设备处于非制动非允许缓解状态,则该区域不显示任何图标。
图标与制动状态对应关系

机车信号
当列车运行在 CTCS-2 级和 CTCS-3 级时,D6 区用于显示机车信号,半径为 20 个像素。机车信号的显示标准符合相应规定,字体为 Arial 大小为 14 磅(推荐),颜色为黑色,显示方法如图 12
所示。本项目限于闭塞分区数目只可以显示到 L。
机车信号的具体定义和显示图标的对应关系如表所示。
机车信号图标

限制速度曲线(MRSP)
MRSP 的一个起模点到目标点显示斜线,后面的变速点均以台阶方式显示。
起模点信息
显示起模点信息,只显示动态速度递减的起始点,不涉及速度递增的情况。起模点用一个黄色的垂直光标在 D8 和 D7 的中间显示,宽 2 个像素点。
D 区的显示示意图如下图所示:

5. DMI 操作说明
5.1 列车等级选择
5. DMI 操作说明
5.1 列车等级选择
ATP 启动后可以在 DMI 界面选择列车控制模式,CTCS2 或 CTCS3,当列车在上行方向时列车只可能进入CTCS2级模式;当列车在下行方向时ATP判断TCC/RBC均工作正常则两种模式均可以进入。
注:ATP 上电后,列车会以“部分监控”模式运行,此时需要司机按照限速手动开车向两端运行,运行过程中可以选择控制等级,也可以不选择控制等级。列车通过线路两端初始化应答器后系统会自动根据演练要求进入想入相应的控制等级。在老师教学、使用过程中,需要明确 CTCS3技术规范中对于 ATP 工作“模式”和“等级”的概念。
5.2 控车模式选择
注:ATP 上电后,列车会以“部分监控”模式运行,此时需要司机按照限速手动开车向两端运行,运行过程中可以选择控制等级,也可以不选择控制等级。列车通过线路两端初始化应答器后系统会自动根据演练要求进入想入相应的控制等级。在老师教学、使用过程中,需要明确 CTCS3技术规范中对于 ATP 工作“模式”和“等级”的概念。
5.2 控车模式选择
ATP 再上电启动后自动进入“部分监控”模式,此时可以收到 TCC 或 RBC 的行车许可,但是没有正确的应答器信息,ATP 限速 40km/H,此时需要手动开车至线路两端的模式转换轨处。列车在模式转换轨(G01/G05)收到初始化应答器后列控系统自动转入相应的 C2/3 的完全监控模式。
无论在何种控制等级司机均可在 DMI 上人工选择进入“目视”行车模式,但是“机信”只有C2 模式可以进入;其中“机信、目视”均在 ATP 的开口速度下人工开车行驶,“目视”限速为开口速度 40km/H,“机信”限速为开口速度 80km/H,此时 ATP 不再控制列车方向。要成功从完全监控转入上述模式,需保证先停车,车速为零后方可执行转换,从上述模式转换为完全监控则只需 ATP
判断符合相关逻辑即可人工通过模式开关退出上述模式即可。“机信”“目视”按钮均为两位非自复位式操作开关,点击一次表示进入该模式,再次点击表示退出该模式。
5.3 缓解操作
列车超度、退行等动作发生后 ATP 系统会输出常用制动或紧急制动,在 DMI 上会显示如下图所示图标

其中常用制动图标当列车速度(来自司机手柄模拟)小于 ATP 干预速度后可以自动缓解;紧急制动输出后列车必须停车,只有当列车停车且速度为零(来自司机手柄模拟)后方具备缓解条件,此时 DMI 上会出现 图标提示司机允许环节紧急制动,司机需要按压 DMI 界面的“缓解”图标 执行缓解操作。如果列车不能够成功缓解则司控器无法控制列车运动。

长沙 简易驾驶练习器 简易驾驶练习装置 简易驾驶练习设备
¥8000.00

常州 车辆安全带保护作用体验装置 车辆安全带保护作用体验装置
¥8000.00

邯郸 城市轨道交通电气控制回路系统 城市轨道交通电气控制回路装置 城市轨道交通电气控制回路设备
¥8000.00

深圳 信号基础设备综合练功台 信号基础设备综合练功装置 信号基础设备综合练功设备
¥8000.00

长沙 提速道岔S700K转辙机实训演练平台 提速道岔S700K转辙机实训演练平台 提速道岔S700K转辙机实训演练柜
¥8000.00

上海 楼宇工程一卡通系统实训平台 楼宇工程一卡通系统实训台 楼宇工程一卡通系统实训箱
¥8000.00

贵州 热工仪表及控制实训装置 热工仪表及控制实训台 热工仪表及控制实训平台
¥8000.00

深圳 提速道岔S700K转辙机实训演练平台 提速道岔S700K转辙机实训演练器 提速道岔S700K转辙机实训演练系统
¥8000.00

北京 过程控制实验装置 过程控制实验箱 过程控制实验器
¥8000.00

深圳 三容水箱对象系统实验装置 三容水箱对象系统实验台 三容水箱对象系统实验箱
¥8000.00

成都媒体网络型数控机床综合维修实训实验室 多媒体网络型数控机床综合维修实训实验器 多媒体网络型数控机床综合维修实训实验柜
¥8000.00

邯郸 提速道岔S700K转辙机实训演练平台 提速道岔S700K转辙机实训演练装置 提速道岔S700K转辙机实训演练设备
¥8000.00

深圳 数控铣床电气控制与维修考核实训装置 数控铣床电气控制与维修考核实训设备 数控铣床电气控制与维修考核实训台
¥8000.00

深圳 电力电子高级工实训考核装置 电力电子高级工实训考核台 电力电子高级工实训考核箱
¥8000.00

深圳 电力电子技师实训考核装置 电力电子技师实训考核系统 电力电子技师实训考核平台
¥8000.00

上海 柴油车电器实训台 柴油车电器实训装置 柴油车电器实训设备
¥8000.00

深圳 柳工856H装载机全车电器实训台 柳工856H装载机全车电器实训器 柳工856H装载机全车电器实训
¥8000.00

深圳 猛士2050全车电器实训台 猛士2050全车电器实训平台 猛士2050全车电器实训箱
¥8000.00


-
13102140960
-
022-86931320
高铁列车运行控制系统实训考核装置 高铁列车运行控制系统实训设备 高铁列车运行控制系统综合实训台
¥ 800.00 ~ ¥ 1000.00
¥800.00
100400套可售

询价单发送成功~