- 产品
- 详情
- 推荐



收藏
¥10000.00
1-9套
¥9900.00
10-19套
¥9800.00
≥20套

产品规格
可售数量: 100套

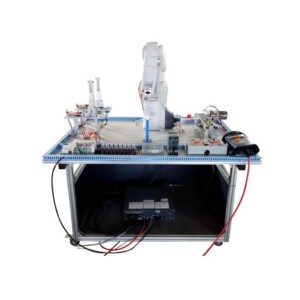
LG-JQR视觉抓取移动机器人实训设备
LG-JQR视觉抓取移动机器人实训设备由驱控一体化移动底盘、协作机器人、避障传感器系统、激光雷达导航系统、北斗差分定位系统、3D深度视觉系统和基于5G网络的通讯系统等组成,平台融合了多种传感器数据采集、数据分析以及智能控制于一体,可以支持与部署当前流行的深度学习应用,是高级机器人研究和开发的综合性开源平台。

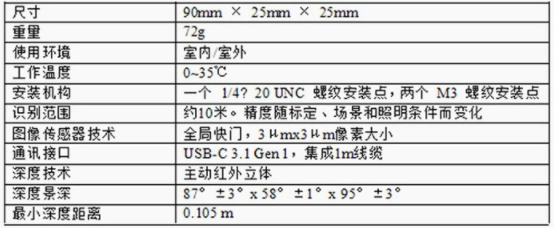
1.3D深度视觉系统
机器视觉开发和场景应用
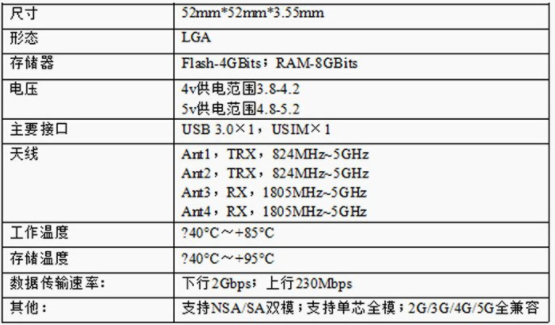
2.基于5G网络
采用5G远程通信应用等技术
3.驱控一体化
本产品由驱控一体化移动底盘
4.综合性开源平台是高级机器人研究和开发的综合性开源平台
系统提供底层电机的驱动控制设计、移动机器人导航定位研究、机械臂的运动学和动力学研究、机器视觉开发和场景应用、5G远程通信应用等技术。平台支持MATLAB/SIM-ULINK和ROS联合开发,可支撑相关科研人员在该平台上进行深度学习、自动驾驶、机器人移动作业等人工智能的应用研究,是机器人工程专业建设、机器人科研、人工智能研究知名的教学、科研载体,也是面向室外作业、农业摘取、巡逻作业等产业应用的基础平台。
产品特点
1.采用工业结构设计,符合工业标准,支持多种环境下工业场景应用;
2.基于模块化设计,拆装便捷、结构紧凑、功能丰富;
3.六轴机械臂、底盘、视觉、导航系统均采用自主开源化的设计,可自由进行单独或融合算法研究;
4.平台同时支撑MATLAB和ROS联合进行算法开发研究,适用范围广;
5.提供大量的DEMO算法及实验案例,供用户在更深层次上的学习和研究;
6.平台开放底层,完全开源。预留开发接口,可进行集成应用,提供全方位的技术支持,能很好支撑工业应用,
7.使用高性能计算机作为主控系统,可实现机械臂、底盘、视觉、导航系统、夹爪的控制,满足大量数据的处理运算需求;
8.可用于工业生产、生物和医学实验室自动化、智能物流仓储、智能识别、安防巡检等研究及应用;
系统配置

实验案例
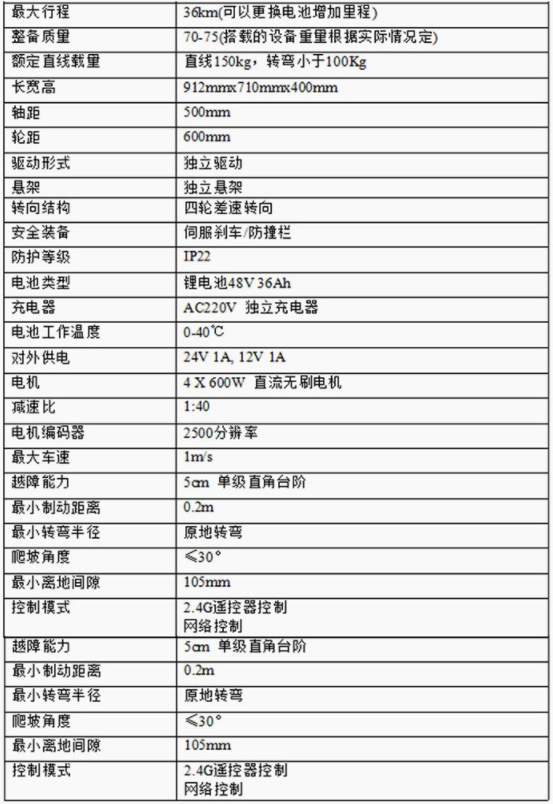
室外重载驱控一体底盘系统
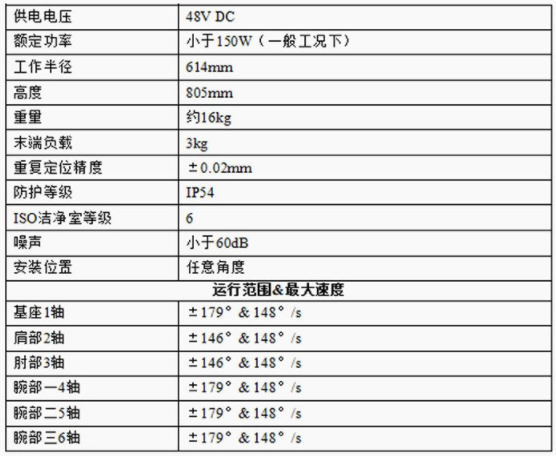
开源协作臂系统
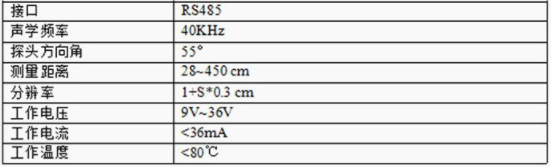
超声波避障系统
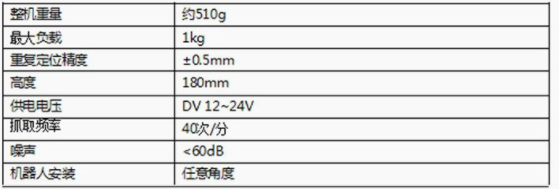
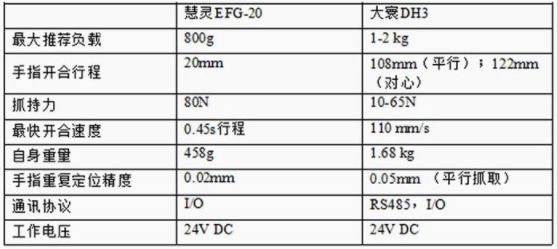
末端柔性夹爪
视觉采集系统
2D激光雷达

差分北斗定位系统

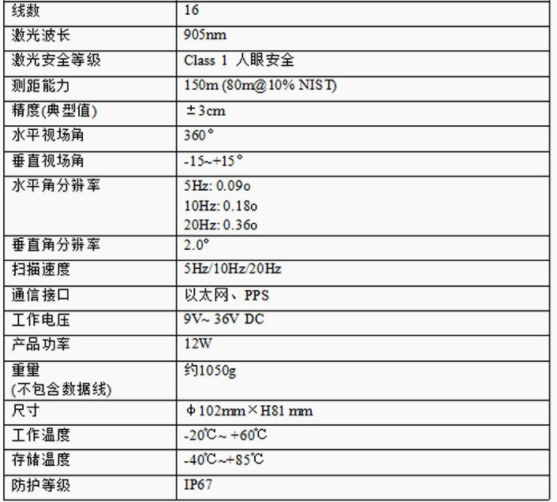
3D激光雷达系统
5G通信系统
高性能末端系统
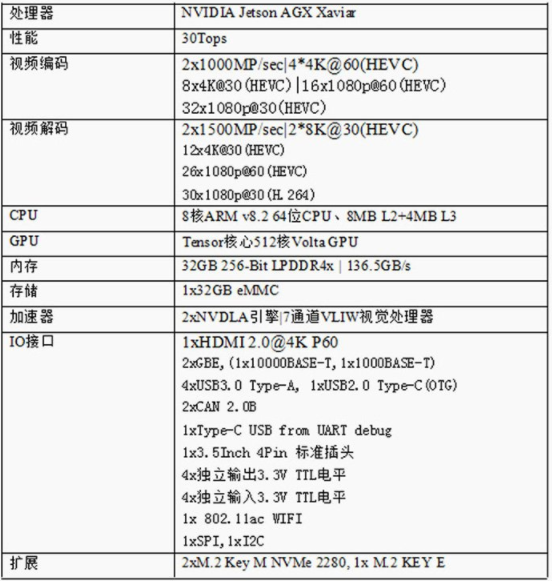
控制主机
1.开源协作臂系统
(1)机器人机械结构认知实验
(2)驱动和控制系统认知实验
(3)运动学基本知识实验
(4)坐标系和DH参数设定
(5)正运动学控制实验
(6)逆运动学控制实验
(7)关节空间轨迹规划控制实验
(8)笛卡尔空间轨迹规划控制实验
(9)单关节PID算法正弦曲线跟踪实验
(10)双关节PID算法正弦曲线跟踪实验
(11)单关节自适应控制算法正弦曲线跟踪实验
(12)单关节零力拖动实验
(13)双关节零力拖动实验
2.超声波避障系统
(1) ROS下超声波数据的采集及分发
3.末端柔性夹爪
(1)在WINDOWS下控制夹持器
(2)在ROS下控制夹持器
(3) MATLAB中的夹持器结构建模
(4) MATLAB通过ROS控制夹持器
4.视觉采集系统
(1) CANNY边缘检测案例
(2) CONTOUR轮摩检测案例
(3) HOUGH线段检测案例
(4)人脸检测案例
(5)图像旋转缩放变换案例
(6) HAAR+BOOSTING特征检测研究
(7) 小二乘法拟合研究
(8)机器学习SVMi训练测试研究
(9)机器学习KNN训练测试研究
5.室内激光雷达
(1)激光雷达室内建图、定位导航实验
(2)激光雷达室内路径规划实验
(3)激光雷达与惯导融合定位研究
6.差分北斗定位系统
(1)北斗定位导航系统设计与应用案例
(2)无线通讯技术应用案例
(3) RTK定位定向技术应用案例
7.室外激光雷达系统
(1)激光雷达的点云获取及数据分析
8.5G通信系统
(1) 5G通信与信息融合研究
研究方向
(1) 仿真建模、半实物仿真
(2)机器人运动学、动力学相关实验
(3)拖动示教、力位混合控制
(4)伺服驱动技术与算法
(5)机器人控制系统设计
(6)人工智能/深度视觉
(7)图像处理
(9) 人脸识别
(10)特征识别、深度学习
(11) 机器人视觉伺服设计、避障与路径规划
(12)移动底盘设计
(13)激光定位导航、路径规划、避障检测
(14)北斗导航通讯技术及算法
(15)姿态解算、滤波算法、卫星与惯导融合
(16) 5G通讯技术与应用
(17)远程控制与信息传输、信息融合
(18)总线与接口
(19)危险作业、智能仓储物流/智能安防巡检等
性能指标
室外重载驱控一体底盘系统
开源协作臂系统
超声波避障系统
末端柔性夹爪
视觉采集系统
2D激光雷达
差分北斗定位系统
3D激光雷达系统
5G通信系统
高性能末端系统
控制主机
开源算法及软件应用案例
1控制与半实物仿真系统
(1)IO模块应用案例
(2)编码器模块应用案例
(3) PWM模块应用案例
(4) ADC模块应用案例
(5) DAC模块应用案例
(6) SCI、 SPI、 CAN、 IIC通信模块应用案例
(7)硬件在环仿真实验案例
2六轴机械臂控制系统
(1)机器人机械结构认知实验
(2)驱动和控制系统认知实验
(3)运动学基本知识实验
(4)坐标系和DH参数设定
(5)正运动学控制实验
(6)逆运动学控制实验
(7)关节空间轨迹规划控制实验
(8)笛卡尔空间轨迹规划控制实验
(9)单关节PID算法正弦曲线跟踪实验
(10)双关节PID算法正弦曲线跟踪实验
(11)单关节自适应控制算法正弦曲线跟踪实验
(12)单关节零力拖动实验
(13)双关节零力拖动实验
3移动底盘系统
(1)伺服电机驱动控制实验
(2)差速转向算法研究
(3)激光导航与里程计融合案例
4深度相机系统
(1) CANNY边缘检测案例
(2) CONTOUR轮廓检测案例
(3) HOUGH线段检测案例
(4)人脸检测案例
(5)图像旋转缩放变换案例
(6) HAAR+BOOSTING特征检测研究
(7) 小二乘法拟合研究
(8)机器学习SVM训练测试研究
(9)机器学习KNN训练测试研究
5北斗定位导航系统
(1)北斗定位导航系统设计与应用案例
(2)无线通讯技术应用案例
(3) RTK定位定向技术应用案例
6.激光雷达系统
(1)激光雷达室内建图、定位导航实验
(2)激光雷达室内路径规划实验
(3)激光雷达与惯导融合定位研究
7.5G通信系统
(1) 5G通信与信息融合研究
8支持研究方向
(1)仿真建模、半实物仿真
(2)机器人运动学、动力学相关实验
(3)拖动示教、力位混合控制
(4)伺服驱动技术与算法
(5)机器人控制系统设计
(6)人工智能/深度视觉
(7)图像处理
(9)人脸识别
(10)特征识别、深度学习
(11)机器人视觉伺服设计、避障与路径规划
(12)移动底盘设计
(13)激光定位导航、路径规划、避障检测
(14)北斗导航通讯技术及算法
(15)姿态解算、滤波算法、卫星与惯导融合
(16) 5G通讯技术与应用
(17)远程控制与信息传输、信息融合
(18)总线与接口
(19)自动驾驶、智能仓储物流、智能安防巡检等

LGN-03C型 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00

定制LGJ-SZ02型 光机电一体化双轴位置控制实训装置、 光机电一体化双轴位置控制实训设备、光机电一体实训系统
¥8900.00
供应LG-IOR03型 六自由度机器人实训系统、六自由度机器人实训装置、六自由度机器人实训设备
¥9800.00

预售LG-RAI02型 工业机器人与视觉实训平台、工业机器人与视觉实训装置、工业机器人与视觉实训设备
¥10000.00

定制LG-XTP02型 通风排烟系统考核培训装置、通风排烟系统考核培训设备、通风排烟系统考核培训系统
¥8900.00

定制 PLC可编程控制器实验装置、 PLC可编程控制器实验设备、 PLC可编程控制器实验系统
¥8900.00

定制LG-IRB01型 ABB机器人实训平台、ABB机器人实训装置、ABB机器人实训设备
¥9800.00

定制 LG-DTS02型 电动机综合测试台、电动机综合实训装置、电动机综合实训设备
¥10000.00

定制 LG-DLW03型 电力系统微机线路保护实训考核装置、电力系统微机线路保护实训考核设备
¥8900.00

定制LGW-01D型 维修电工仪表照明实训考核装置、维修电工仪表照明实训考核设备、维修电工仪表照明实训考核系统
¥8900.00

供应 工业全数字控制实训装置、工业全数字控制实训设备、工业全数字控制实训系统
¥8900.00

供应 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00

供应维修电工仪表照明实训考核装置、维修电工仪表照明实训考核设备、维修电工仪表照明实训考核系统
¥9800.00

供应高性能初级维修电工及技能考核实训装置、高性能初级维修电工及技能考核实训设备、高性能初级维修电工考核实训台
¥9800.00

供应LGBP-203A 变频调速实验装置、变频调速实验设备、变频调速实验系统
¥8900.00

楼宇照明监控系统实验实训装置、楼宇照明监控系统实验实训设备、楼宇照明监控系统实验实训系统
¥8900.00

微机继电保护装置、微机继电保护设备、微机继电保护系统
¥9800.00

工业机器人实训实验平台、 工业机器人实训实验装置、 工业机器人实训实验设备
¥10000.00


-
010-82827835
-
1380-126-3538

视觉抓取移动机器人实训考核装置 视觉抓取移动机器人实训设备 视觉抓取移动机器人综合实训台
¥ 9800.00 ~ ¥ 10000.00
¥9800.00
100套可售

询价单发送成功~