- 产品
- 详情
- 推荐



收藏
¥10000.00
1-9套
¥9900.00
10-19套
¥9800.00
≥20套

产品规格
可售数量: 100套

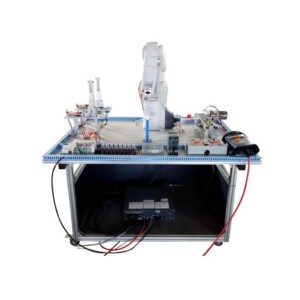
LG-JQR4轴水平多关节机器人实训设备
技术参数
项目 | 规格 | |||
机器人名称 | HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | |
臂全长(第有臂+第2臂) | 205+275=480mm | 275+275=550mm | 375+275=650mm | |
运行角度和行程 | J1(第1轴) | ±130° | ||
J2(第2轴) | ±143.5° | ±150° | ±150° | |
*=10:100mm | ||||
Z(第3轴) | *=20:200mm | |||
*=32:320mm | ||||
T(第4轴) | ±360° | |||
轴组合 | J1(第1轴)+J2(第2轴)+Z(第3轴)+T(第4轴) | |||
大可搬运质量 | 8 | |||
标准循环时间(*2) | 0.28sec | 0.28sec | 0.31sec | |
J1 | 450deg/sec | 450deg/sec | 450deg/sec | |
J2 | 785deg/sec | 785deg/sec | 785deg/sec | |
Z | 10:1700 mm/sec,20:2300mm/sec,32:2475mm/sec | |||
T | 2500deg/sec | |||
J1+J2 | ±0.01mm | ±0.012mm | ±0.012mm | |
Z | ±0.01mm | |||
T | ±0.004° | |||
大输入压力(向下) | 98N(1秒以下) | |||
大容许惯性力矩(惯性) | 0.12kgm2 | |||
位置检测方式 | 的对编码器 | |||
±0.02mm | ||||
驱动电机、制动器 | 全轴AC伺服电机Z轴,T轴,带制动器 | |||
用户空气配管 | 4系统(φ4×2,φ6×2) | |||
用户信号线 | 19芯(接近传感器的信号线) | |||
空气源 | 常用压力 | 0.05-0.35Mpa | ||
大容许压力 | 0.59MPa | |||
空气传播噪音 | 80dB以下 | |||
质量 | 约31kg | 约31.5kg | 约32kg | |
*1:型号中的“*"表示Z轴行程
*2,负载2kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
*3,重复定位精度是周围环境温度恒定时的精度

外形尺寸与运行范围 单位:mm


产品特性

运用领域

LGN-03C型 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00

定制LGJ-SZ02型 光机电一体化双轴位置控制实训装置、 光机电一体化双轴位置控制实训设备、光机电一体实训系统
¥8900.00
供应LG-IOR03型 六自由度机器人实训系统、六自由度机器人实训装置、六自由度机器人实训设备
¥9800.00

预售LG-RAI02型 工业机器人与视觉实训平台、工业机器人与视觉实训装置、工业机器人与视觉实训设备
¥10000.00

定制LG-XTP02型 通风排烟系统考核培训装置、通风排烟系统考核培训设备、通风排烟系统考核培训系统
¥8900.00

定制 PLC可编程控制器实验装置、 PLC可编程控制器实验设备、 PLC可编程控制器实验系统
¥8900.00

定制LG-IRB01型 ABB机器人实训平台、ABB机器人实训装置、ABB机器人实训设备
¥9800.00

定制 LG-DTS02型 电动机综合测试台、电动机综合实训装置、电动机综合实训设备
¥10000.00

定制 LG-DLW03型 电力系统微机线路保护实训考核装置、电力系统微机线路保护实训考核设备
¥8900.00

定制LGW-01D型 维修电工仪表照明实训考核装置、维修电工仪表照明实训考核设备、维修电工仪表照明实训考核系统
¥8900.00

供应 工业全数字控制实训装置、工业全数字控制实训设备、工业全数字控制实训系统
¥8900.00

供应 PLC可编程控制器实验装置、PLC可编程控制器实验设备、PLC可编程控制器实验系统
¥8900.00

供应维修电工仪表照明实训考核装置、维修电工仪表照明实训考核设备、维修电工仪表照明实训考核系统
¥9800.00

供应高性能初级维修电工及技能考核实训装置、高性能初级维修电工及技能考核实训设备、高性能初级维修电工考核实训台
¥9800.00

供应LGBP-203A 变频调速实验装置、变频调速实验设备、变频调速实验系统
¥8900.00

楼宇照明监控系统实验实训装置、楼宇照明监控系统实验实训设备、楼宇照明监控系统实验实训系统
¥8900.00

微机继电保护装置、微机继电保护设备、微机继电保护系统
¥9800.00

工业机器人实训实验平台、 工业机器人实训实验装置、 工业机器人实训实验设备
¥10000.00


-
010-82827835
-
1380-126-3538

4轴水平多关节机器人实训考核装置 4轴水平多关节机器人实训设备 4轴水平多关节机器人综合实训台
¥ 9800.00 ~ ¥ 10000.00
¥9800.00
100套可售

询价单发送成功~